
舰船装备
兰德公司:无人海上航行器的当前和未来技术分析
发布日期: 2019-01-11 来源:远望智库技术预警中心 申元璋 访问量:
本文为远望智库原创文章,转载请标明来源和作者 2019年1月4日,美国智库兰德公司发布题为《推进自主系统发展――对无人海上航行器当前和未来技术的分析》的研究报告。报告分析了美国海军无人自主系统当前的作战应用,在未来舰队体系结构中的可能使用情况和技术挑战,提出了一种单一任务小型化无人航行器作战概念,并给美国海军提出了七条建议,其中之一是建议海军赋予无人平台火力发射决策权。
 一、无人自主系统在海军杀伤链的应用
一、无人自主系统在海军杀伤链的应用
“杀伤链”指的是为达到作战效果而需要采取的一系列行动。这里的“杀”不是指致死或毁灭物体,而是指多个相关步骤产生了理想的结果。在战争领域,杀伤链包括情报准备、探测、定位、目标选择与瞄准、打击。就海军而言,自主系统在三个领域发挥重要作用:水雷对抗;拒止区域情报监视与侦察;作战欺骗。
 二、未来舰队建构中的自主能力需求
二、未来舰队建构中的自主能力需求
(一)克服局部反介入与区域拒止挑战。未来的舰队体系结构都提出,舰船需要在容易被布雷的区域行动。这要求水面行动大队和更大规模的编队拥有建制的水雷对抗能力。根据当前的做法,水雷对抗任务一般由专用军舰来实施。但是海军的未来舰队体系结构设计要求舰船分散部署,各舰船都要能够发射导弹或其他动能武器。这意味着各舰船不能仅执行一项任务,而且要求水雷对抗系统占据更小的空间,而且在几乎没有人员干预的情况下自动实施。这些都需要提升传感器的处理能力和舰上决策能力。此外,局部反介入与区域拒止挑战还包括能够发射导弹的水面平台或潜艇。为对付这些挑战,无人水面平台可充当诱饵,来迷惑敌人的目标选择与打击活动,将敌人的平台吸引至我方有人平台的武器打击范围内。此外,无人平台可以起降反潜直升机,这样能增加直升机的航程和任务范围。不过,海军目前还不具备这些能力,需要加大力度进行研发。
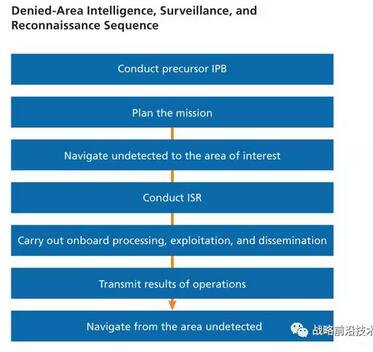
(二)在拒止区域内搜集情报。这一任务的挑战是,存在大量水雷、反潜战传感器的拒止区域,未来将变得更加难以进入,从而给试图进入的无人潜航器带来更大的压力。无人潜航器不仅要绕过水雷和其他障碍,而且要克服水下传感器和武器。而且,它们传送信息的能力将受到严重限制,因为如果浮出水面或者发射信号,就有可能被探测到并受到火力打击。
(三)实施进攻性布雷。对实施进攻性布雷潜航器的要求,类似于对执行拒止区域情报监视与侦察任务的潜航器的要求。开展进攻性布雷活动时,无人潜航器要首先要从反介入与区域拒止系统的传感器探测距离之外向目标区域移动,要避开障碍物和敌人的反制措施;潜航器要携带大量的水雷来制造有效的雷场;最好还能控制部署的感应式水雷的激活。
(四)不给敌人提供目标瞄准信息,自主水面行动大队各平台互相协作。未来舰队设计体系结构假设,敌人的反介入与区域拒止威胁将达到很高的水平,一旦该区域内的舰船被敌人发现,将很难生还。为此,未来舰队设计体系结构认为,水面舰队各平台要分散部署并实施无线电发射控制。在这样的环境中,无人水面行动大队不仅要能够自我导航并进行欺骗,而且要能够选择目标、瞄准目标并投送弹药。这就要求各无人平台之间进行协调配合。目前无人平台还不具备这种能力。而且从政策上讲,存在很大的争议,美国军方担心让无人平台自己做出发射火力的决策,会带来很多问题。
三、自主系统新的发展方向
目前,各自主无人系统之间的实时协作非常少。如果利用多个小型平台,平台之间可以为了共同的目标而相互合作,压缩执行任务的时间,而且可以同时在一个环境中部署更多的系统,提高系统的抗毁能力。未来技术的发展将可以做到这一点。下面就以水雷对抗任务、拒止区域情报监视与侦察、作战欺骗这三种任务领域为例,来阐述单一任务系统的价值。
 (一)水雷对抗任务。目前的水雷对抗任务是有一个平台执行一系列的任务,包括探测、识别、打击等。未来新概念是同时使用多个平台,每个平台执行一种任务。例如,平台A携带广域传感器,负责搜索并识别雷区内符合水雷特征的目标。这些平台将定位系统传输给携带优化识别传感器的平台B,然后平台B将这些信息传输给打击水雷的一次性平台。每个平台的自主性都相对较低。多个平台同时在雷场执行任务,可以缩短扫雷或猎雷的时间。但是,这种情况需要各平台之间的信息共享,并使用同一个作战空间参考图。各平台之间需要有可靠的近距离通信系统,各平台需要精确的通用导航系统。人类操作员要掌握并监督各平台的活动情况。
(一)水雷对抗任务。目前的水雷对抗任务是有一个平台执行一系列的任务,包括探测、识别、打击等。未来新概念是同时使用多个平台,每个平台执行一种任务。例如,平台A携带广域传感器,负责搜索并识别雷区内符合水雷特征的目标。这些平台将定位系统传输给携带优化识别传感器的平台B,然后平台B将这些信息传输给打击水雷的一次性平台。每个平台的自主性都相对较低。多个平台同时在雷场执行任务,可以缩短扫雷或猎雷的时间。但是,这种情况需要各平台之间的信息共享,并使用同一个作战空间参考图。各平台之间需要有可靠的近距离通信系统,各平台需要精确的通用导航系统。人类操作员要掌握并监督各平台的活动情况。

(二)拒止区域情报监视与侦察。目前使用的大型平台续航时间足够长,而且能够自行处理搜集到的信息。但是平台的传感器感知距离是有限的,如果无人平台为了提升传感器作用距离而向前运动,就会降低续航时间。而且,大型平台容易被敌方的渔网或水下障碍物等控制。如果在大面积海域内分布多个小型平台,则能够扩大传感器覆盖范围,而且不容易被对方反制。但是,这种作战概念面临如下限制。一是需要有专门的平台来收集、整合传感器搜集的信息,并将其定期发送给需要相关情报的机构。这种平台可能是不一定像大排量潜航器那样大那样复杂,但至少要比分散部署的各小平台体积大,这样会成为敌人攻击的目标。二是虽然当前自主系统处理和融合信息的能力发展很快,但可靠的水下通信能力发展却不够快。如果各分布式无人平台不能将信息实施发送给处理平台,那么这些信息就没有多大用途。而且这些信息容易受到天然因素和人为因素的干扰。
 (三)作战欺骗:水面诱饵与防空。小型单一任务平台的一个明显例子就是智能持续空投诱饵。这些诱饵可以大面积分布,发出噪音信号来加大敌人的定位和瞄准难度。与使用一个大型平台执行一系列任务不同,新的作战概念中,探测平台、跟踪平台和火力发射平台将分散部署,而且位于最适合各自任务的位置上。这种部署方式要求有可靠的战术数据链,要求各平台能够认识共同的战役和战术图。
(三)作战欺骗:水面诱饵与防空。小型单一任务平台的一个明显例子就是智能持续空投诱饵。这些诱饵可以大面积分布,发出噪音信号来加大敌人的定位和瞄准难度。与使用一个大型平台执行一系列任务不同,新的作战概念中,探测平台、跟踪平台和火力发射平台将分散部署,而且位于最适合各自任务的位置上。这种部署方式要求有可靠的战术数据链,要求各平台能够认识共同的战役和战术图。
 四、建议
四、建议
一是重新审视关于自主性技术进展方面的假设。本研究认为,短期内,自主系统不太可能解读环境并做出独立决策,尤其是在动态环境中。
二是对于要求较高层次自主性的系统中,将自主性的发展与可能成为限制因素的其他能力的发展进行整合。例如,比起执行远程任务所需的自主性特征,远程大排水量无人水下航行器容易受到发电能力和储电能力的影响。
三是支持相关研发工作,弥补控制理论和机器学习理论这两种自主性理论之间的空白。
四是使用自主系统的独特能力来推动新的作战概念发展,而不是简单模仿有人系统。可以利用简单但量大的系统来携带多种传感器来执行任务,这种做法很有前途。这种能力将要求研发一种独特的系统,这种系统能融合多种输入,来打造通用作战图,共各作战系统使用。
五是接受自主系统将需要做出打击决定这一事实。关于自主系统的政策分歧有很多,但核心问题是要如何最好地发挥自主系统的用途。如果系统的使用环境中有大量潜在目标,而且需要在很短的时间内做出打击决定,那么人力干预就可能与战术要求相违背(除非是人力决定取消打击)。而且,许多情况下,人也很难决定是否打击。海军不应尝试让人去决定是否对目标进行打击,而是要接受这样一个事实:现代化武器系统对打击时间的要求非常严格,人力已经不适合进行干预。为了做出有效的打击决定,研发人员要接受机器将做出这样的决策这一事实。
六是开发一种机制,使人类能定期评估自主系统是否对环境进行了错误的解读。由于自主系统目前还未学会解读环境,如果对方改变了自主系统的预期作战环境,这些系统就特别容易受到影响。人类操作员要能够识别某一系统对环境产生了错误的解读,这是监督机制的重要组成部分。当机器做出决策时,人类操作员尽量不要干预。如果系统的行为表示它误解了事件和周边情况,人类操作员就要多干预。自主系统必须有合适的界面,使人类操作员能定期评估它感知到了什么情况以及如何应对这些情况。
七是密切评估复杂多功能系统的可行性,考虑强调简单但互相合作的系统。
相关附件:
相关新闻:
德国蒂森克虏伯公司向土耳其海军交付第二艘Reis级潜艇 (2025-12-01)
俄罗斯可搭载水下无人武器的新型核潜艇下水 (2025-11-06)
美国将正式废除航母电磁弹射,但造蒸汽弹射器的美国企业已经有党委书记了 (2025-11-05)
普京确认“波塞冬”测试成功,揭秘俄“末日武器”的绝对威慑力 (2025-10-30)
德国海军接收新型舰载激光武器系统:反无人机能力实现跨越式提升 (2025-10-29)
韩国KSS-III潜艇第二批次首艇“张英实”号下水 (2025-10-27)
关于我们 | 船舶物资与市场 | 网站地图 | 本站动态 | 访问量:
Copyright@2001-中国船舶信息网络中心 editor@shipol.com.cn
京ICP备10022080号-3 京公网安备11010502044394