
美海军水下战未来发展重点技术解析
发布日期: 2021-09-21 来源:装备参考 访问量:
本文主要整理分析美国海军为推进水下战能力体系化建设,在近两年启动的协同作战、指挥控制通信、无人系统自主性与运用等领域研发项目。本文为上篇。
美国是全球水下战体系化建设起步最早,技术发展最先进的国家。为进一步推进分布式作战概念,将分散在广阔区域内的各种探测装置、传感装置、指挥中心和各种武器系统集成为一个统一高效的大系统,实现战场态势的信息共享和武器的高效优化使用,近年来,美海军启动了多个研发项目,覆盖协同作战、指挥控制通信、无人系统自主性与运用等不同技术领域,以期整体提高美海军水下作战能力。本文将分上下两篇,对其中的重要项目进行解析。
1 水下攻防作战关键技术
为推进美水下战开发司令部(UWDC)《全频谱水下战作战概念》文件中确定的3个推进点——潜艇的高级进攻任务、海底和海床战(Subsea and Seabed Warfare,SSW)以及分布式水下战(使所有水下战资产全面参与海军的“分布式海上作战”概念),美海军于2021财年启动了全频谱水下战(FSUSW)项目,为海底、水下等领域开展的攻防作战开发新技术。
FSUSW项目聚焦战区水下战(TUSW)、联合目标瞄准和打击、海底和海床战,海军在项目中确定了5大推进领域,分别是:水下效应器、一体化远征海底系统之系统、多载具鱼雷发射管开发系统(MVTTDS)、超视距(OTH)水下无人机(UAV)、用于实现指挥官和区域作战司令规划效果的水下发射设备。它们是实现《海军作战部长指南》、“分布式海上作战”概念以及有人-无人作战能力构想的关键,同时,这5大领域也是海军与美军战略司令部(STRATCOM)、印太司令部(INDO-PACOM)、舰队和水下战司令共同筛选出的,具有普适性。但该项目的详细目标属于涉密内容。
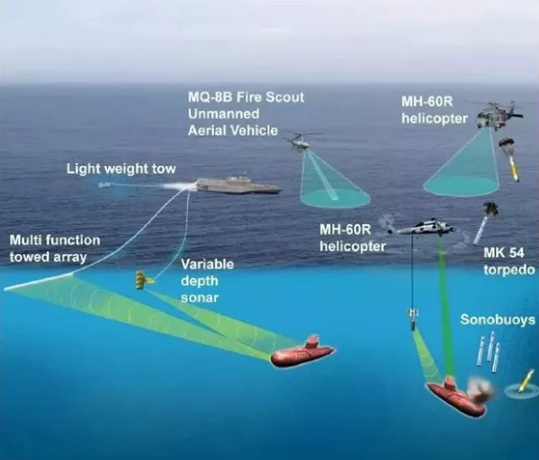
FSUSW项目针对的任务包括反潜战、反水面战、打击、情报监视与侦察、水雷战,以及海底和海床战。项目包含可负担的移动反潜战监视系统(AMASS)方面的研究,并利用“北冰洋移动观测系统”(AMOS)项目开发的技术。2021-2022财年,FSUSW项目的主要工作包括:
•为可部署设备及相关的多载具鱼雷发射管开发系统开发物理模型并进行验证;
•建模仿真、试验水下无人机和水下发射设备,确定各概念的技术可行性和实用性;提高水下无人机和水下发射装置组件的可靠性;完成水下发射装置的应用研究开发,计划2023年启动小型水下装置的先进技术开发;
•使用旧设备进行全尺寸实验;
•表征潜艇和系统的空间、重量和功率所造成的传感器、发射器和指挥控制限制;
•提升自主性,从而增强装置传感器、发射器和通信系统的能力;
•开发优化的导航和动力备选方案,在给定的载具尺寸范围内显著提升任务效能;
•开展“实兵仿真、虚拟仿真和构造仿真”(LVC)实验,使用现有的海底子系统来定义远征海底系统之系统的性能特点和技术选项,包括海上数据收集。
2 无人水下武器系统相关技术
美国海军于2021财年启动了CLAWS项目,旨在开发自主无人水下武器系统,能够在第一岛链内作为作战司令部司令(CCDR)的进攻补充。CLAWS项目将秘密扩张无人潜航器(UUV)的活动范围,并为任务区域增加动能效果。项目将交付算法,使所有UUV系列都能在复杂、动态和降级的环境下运行。项目将演示在拒止水域的自主任务,开发并演示大型UUV生存自主技术,并开发特种任务载荷的自主性和发射能力。CLAWS将能够针对实力接近的对手的防御工事,完成相应作战任务,并维持与海军指挥控制、火力的关键通信,提供关键的ISR信息。
2021-2022财年,项目的主要工作包括:
•持续开展针对在拒止和竞争性区域运行的超大型UUV的自主载荷(动能和非动能型)的应用研究;
•开发自主性,用于:提升操作员对动能载荷在竞争性区域运行的信任度,为从超大型UUV发射蜂群载荷开发自主性和指挥控制能力;在不同环境条件下部署非动能效果;利用舰载环境测量数据和指挥控制后援(C2 reach back)以提供任务优势;
•增强在拒止环境下导航的能力,达到现有能力的十倍;
•基于导航能力,开展模块化紧凑型UUV作战系统的开发,作战系统将使用涉密载荷进行演示验证,2022年8月将对技术初始原型进行受控环境测试;
•演示与指挥控制系统链接的自主算法,用于部署跨域无人系统。
3 有人-无人协同技术
有人-无人混合舰队是美海军已确定的未来舰队组成模式。为减少联合作战中对自主系统监管所需的人力资源消耗,同时提升有人-无人作战协同性,美海军谋划在2022财年启动“有人和自主团队(MATes)”项目,开发自主机器人技术和协同自主行为,使自主系统能跨域与有人单位无缝联合作战,实时适应和优化,共享任务目标。
MATes项目聚焦多个自主性架构,并针对不断改变的任务,基于感知数据和人类操作员连通性进行架构优化。开发的技术将监控人类队员或有人驾驶系统队员的状态、行为、使命和敌对威胁状态,人类队员或有人驾驶系统队员对自主系统可预测、可交流、可信任,实现自主系统优化,与人类/有人驾驶系统队员及任务目标保持一致。项目将开发直观的人类/自主系统界面,从而允许操作员聚焦在高阶决策任务上,还能管理大量自主系统(100到1000部)。
2022财年,MATes项目将探索有人-无人系统间执行各类复杂多域作战任务时的自主性、感知和指挥控制概念,任务范围从全自主到高度监管下的作战,要求随外界变化敏捷地对项目内容进行优化。

相关附件:
相关新闻:
德国蒂森克虏伯公司向土耳其海军交付第二艘Reis级潜艇 (2025-12-01)
俄罗斯可搭载水下无人武器的新型核潜艇下水 (2025-11-06)
美国将正式废除航母电磁弹射,但造蒸汽弹射器的美国企业已经有党委书记了 (2025-11-05)
普京确认“波塞冬”测试成功,揭秘俄“末日武器”的绝对威慑力 (2025-10-30)
德国海军接收新型舰载激光武器系统:反无人机能力实现跨越式提升 (2025-10-29)
韩国KSS-III潜艇第二批次首艇“张英实”号下水 (2025-10-27)
关于我们 | 船舶物资与市场 | 网站地图 | 本站动态 | 访问量:
Copyright@2001-中国船舶信息网络中心 editor@shipol.com.cn
京ICP备10022080号-3 京公网安备11010502044394